
机器视觉--基于模板匹配的目标检测
2024-03-1
制造业中,机器视觉用来做目标检测是一种常见的需求,通过相机拍照,可识别视野内物品的位置和种类,以控制机械手的抓取。虽然基于深度神经网络(YOLO、TensorFlow等)可以做到一次性检测出目标位置及种类,但这类神经网络的训练耗时耗力,难度较大,一般的应用中,采用模板匹配的方式仍具有简便易行,部署快速等优点,其精度完全能够满足需求。
下面简单展示基于模板匹配技术的目标检测定位算法效果:
一、 标准件的检测
1) 从反光性上,标准件有强反光(如不锈钢)、弱反光(碳钢)两类,光源可采取不同的打光方式,以突出被测目标的特征。下图展示了一个示例
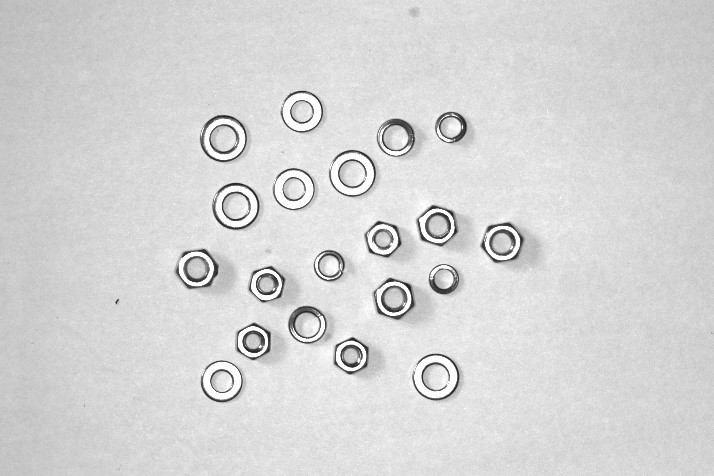
打光效果的选择,应根据被测物体的特征进行,各种类别的被测物体之间有显著的特征区别。如本例中,螺母将会和平垫均具有圆形的亮圈区域,应突出螺母的六边形暗区,否则将不易区分螺母和平垫。
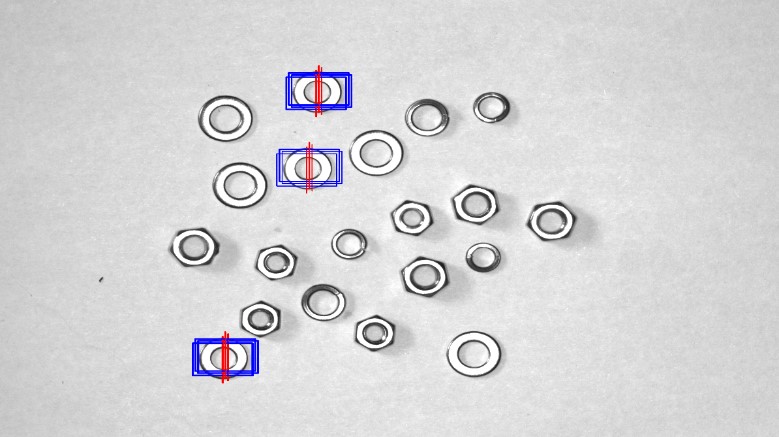
2) 在图中提取出匹配结果大于阈值的点,绘制方框,这里便是找到的目标位置。目标位置坐标为图像坐标,根据标定结果转换为世界坐标,即可控制机械手的抓取。
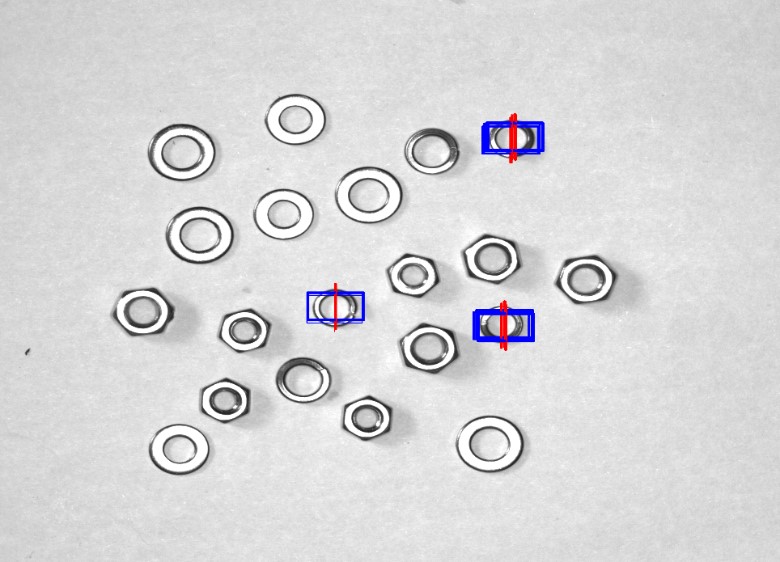
3) 如需适用不同角度的模板匹配,需要将模板进行一定间隔的旋转,每旋转一步,进行一次模板匹配,如图所示(螺母和弹垫)均被检测出来了。
丁斗科技的成功案例:位置检测精度优于±0.1mm,角度精度优于±0.1°。可为您进行配套开发,具体可联系丁斗科技